欢迎浏览能华充电机公司网站!
在线留言
|
联系我们
服务热线:
0531-68684888
首页
关于我们
公司简介
企业荣誉
客户案例
联系我们
公司简介
济南能华(简称“能华电源”)是国内专业的电源设备制造商,为您提供各种优质电源解决方案。公司自创立之初视产品质量为己任,严格按照规范生产。公司产品博得国内外客户信任,取得优异的成绩。为中国航天电源供应商、红沿河核电站电源供应商等,军工品质,产品远销海
企业荣誉
我公司产品应用于:电子产品生产老化测试、高端科研、航空、电力通信、工业生产等行业
新闻中心
公司新闻
行业资讯
维修保养
产品中心
按充电类型分类充电机
在线式充电机
可调电压电流充电机
固定电压蓄电池充电机
按电池类型分类充电机
电容充电机
铅酸电池充电机
锂电池充电机
镍镉&镍氢充电机
行业专用充电机
电力系统充电机
通信系统充电机
铁路机车充电机
叉车充电机
太阳能电池充电机
船用充电机
电容器充电机
AGV搬运机器人充电机
军用装甲车充电机
航空蓄电池充电机
柴油发电机组充电机
放电仪&充放电一体机
蓄电池放电仪
充电&放电一体机
放电负载+单节监测
UPS容量测试仪
10-300V宽电压放电仪
240V高压直流测试仪
蓄电池检测类
便携巡检监测仪
蓄电池循环放电仪
蓄电池内阻电导测试仪
单体电压监测模块
智能单体活化仪
在线充放电活化设备
应用行业解决方案
电力系统解决方案
通信&数据中心解决方案
铁路机车轨道交通解决方案
船舶系统解决方案
军用航空解决方案
无人机&机器人解决方案
光伏系统解决方案
电容器解决方案
服务支持
售后服务
下载中心
常见问题
咨询留言
人力资源
招贤纳士
招聘流程
联系我们
济南能华机电设备有限公司
地址:济南市高新区联合财富广场1号楼15层
电话:0531-85235777/68684888
手机:15169197576/18766446695
传真:0531-68800432
公司网址:http://www.nenghua.com.cn
E-Mail:nenghua@nenghua.net
新闻中心
新闻中心
公司新闻
行业资讯
维修保养
基于51系列单片机控制步进电机调速闭环系统设计
您当前所在的位置:
主页
>
新闻中心
>
基于51系列单片机控制步进电机调速闭环系统设计
作者: 发布日期:2018-07-22 02:17 信息来源:http://www.ygelc.com/
一、步进电机
1.1步进电机的工作原理
步进电机是将电脉冲信号转变为角位移或线位移的执行机构。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
1.2步进电机的特点
本实验所用的步进电机为感应子式步进电机(型号为42BYG016)。感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
感应子式步进电机某种程度上可以看作是低速同步电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相八拍运行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C=
,D=
.一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。(本实验采用两相四拍)
1.3步进电机的静态指标
相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.
步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
1.4步进电机的动态指标
1)步距角精度:
步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2)失步:
电机运转时运转的步数,不等于理论上的步数。称之为失步。
3)失调角:
转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4)最大空载起动频率:
电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5)最大空载的运行频率:
电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
6)运行矩频特性:
电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。
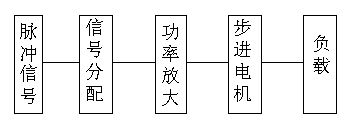
1.5步进电机的驱动控制系统
控制系统的组成方框图如下:
1)脉冲信号的产生
脉冲信号由单片机AT89S52的I/O口产生,一般的脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则越大。本实验采用的占空比为0.5。
2)信号分配
感应子式不仅以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍两种,具体分配如下:二相四拍为
,步距角为1.8度;二相八拍为
,步距角为0.9度。本设计采用步距角为1.8度。
3)功率放大
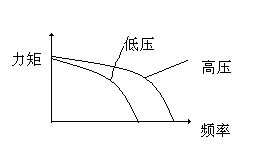
功率放大是驱动系统最为重要的部分。步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。
步进电机一经定型,其性能取决于电机的驱动电源。步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。电压对力矩影响如下:
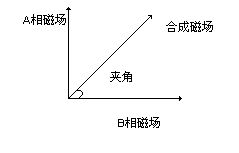
4)功率放大细分驱动器
在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。
二、驱动器
由于单片机的I/O不具有直接驱动步进电机的能力,故在本系统中需要步进电机驱动器,我们选择驱动器为KD-221,该驱动器具有输入电压范围广,控制信号输入方式多样等特点。其具体接法如下:
2.1、电源接线:
①、E高:当驱动电压大于10V时,正极接此座,使用时最大不能大于40V,以防损坏模块。
②、E低:当驱动电压小于10V时,正极接此座。
③、地:驱动电压E高、E低的的负极接此座。
④、A,:接电机A相线圈的二根引线。
⑤、B,:接电机B相线圈的二根引线。
2.2、控制信号接线:
①、CP:接控制器发给步进电机的走步脉冲信号线。
②、CW:接控制器发给步进电机的走步方向信号线。
③、VP:接CP和CW信号的负极,即逻辑电路电源的负极。
④、本驱动器内部设计接收信号为RTTL电平,即5V电平,如其它逻辑电平信号需要接限流电阻,否则可能损坏光耦元件。
三、光电开关
本系统中所用传感器为EE-EX672关电开关,该传感器为开关型传感器,四个接线脚分别为“+,L,OUT,-”其输入电压范围广为直流5-24V,L为控制指示端,当“L”与“+”相连时,传感器未检测到物体时LED灯发光,当“L”悬空时则相反,其特点为:
1.动作模式备有遮光时ON/入光时ON(可切换型)
2.应答频率为1KHZ的高速响应
3.入光显示灯明显,容易进行动作确认.
4.电源电压为DC-24V的广范围
5.备有遮光时入光显示灯灯亮型
上一篇:
ST推出全新STM32软件模块和图形配置工具 简化智能电机控制器设计
下一篇:
电机控制设计简化方法
【
返回栏目
】
关于我们
公司简介
企业荣誉
客户案例
新闻中心
公司新闻
行业资讯
维修保养
产品中心
按充电类型分类充电机
按电池类型分类充电机
行业专用充电机
放电仪&充放电一体机
蓄电池检测类
应用行业解决方案
服务支持
售后服务
常见问题
咨询留言
下载中心
人力资源
招贤纳士
招聘流程
联系我们
Copyright @ 2011-2018 能华电源-济南能华机电设备有限公司 版权所有 《中华人民共和国电信与信息服务业务经营许可证》编号:鲁ICP备08108743号-1