
作者: 发布日期:2016-07-04 19:54 信息来源:http://www.ygelc.com/
引言
在大功率直流电源中,主电路一般采用晶闸管三相全控桥式整流电路,其关键在于如何准确、可靠、稳定地控制晶闸管的导通角。
目前,大功率直流电源现场应用中最为普遍的控制方式大都采用KC或KJ系列小规模集成电路,即采用三相锯齿波信号和直流控制信号相比较获得的移相信号。然而,三相锯齿波信号的斜率、占空比、幅度等与每相的器件参数密切相关,并且比较信号中小的干扰可能造成较大的相移误差,因而电路的可靠性和自动平衡能力较差。
利用单片机作为控制电路,根据三相全控桥触发脉冲之间的逻辑关系,直接产生六相高度均衡的触发脉冲,可以克服KC、KJ系列电路均衡性差的缺点。但是,由于现场系统工作在强电干扰比较严重的场合,为了减小干扰可能引起程序运行紊乱,造成系统失控而引起主电路器件的损坏;另外,为了增强系统的功能,加强人机对话能力,实现显示、打印、命令输入、循环检测、过压过流保护以及软件PI调节器等功能,必须采用双CPU并行工作。但双CPU并行工作既增加了系统的复杂性,又降低了系统的可靠性和实用性。
为了克服上述局限性,利用8098单片机作主控单元, 并充分利用WATCHDOG的抗干扰性能,采用以锁相环(PLL)为基本控制原理的通用触发板作中间界面,构成一种智能化的电厂大功率直流后备电源。图1示出控制系统框图。
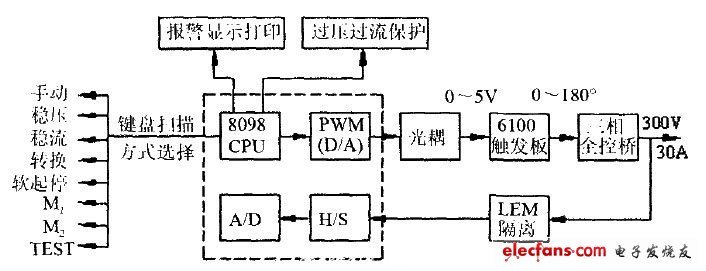
图1 控制系统框图
1 系统工作原理
现以电力系统对电池进行强充、浮充为例,说明系统的工作原理。根据现场要求,系统共设有7种工作方式,见图1。
1)手动方式(M)
系统工作在开环状态,利用8098的PWM口,经滤波后输出一个0~5V的控制电压信号给触发板,使整流桥相应输出电压为0~300V.该方式主要用于系统主电路的检修和维护。
2)稳压方式(V)
稳压方式(V)又称浮充方式,系统作稳压源闭环运行。
为增强系统的灵活性和通用性,利用软件实现PI调节。
(1)标准数字PI算法
图2示出带数字PI调节器的计算机控制系统方框图。
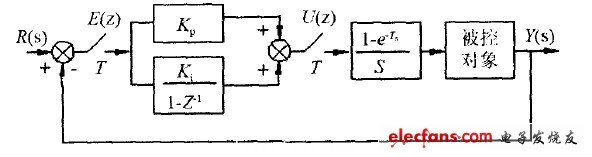
图2 典型计算机控制系统方框图
该数字PI调节器的Z传递函数为:

式中:Ki -- 积分系数,Ki= KoT/Ti;T--采样周期; Ti-- 积分时间常数;Kp-- 比例因子;U(Z)--控制量输出的z传递函数;E(z)- -偏差量的z传递函数。
将式(1)展开,可得以下位置式算法:

式中Uo-- 初始值;Uk - - 第k次采样点获得的控制量;Ek--第k次采样点获得的偏差量;Ej--第j次采样点的偏差值;k一第k次采样点。
整理成递推公式形式:
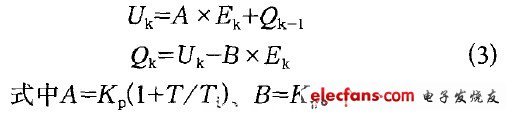
根据上述递推公式,可以非常方便地用软件实现PI调节器。
(2)改进的数字PI算法
标准PI算法一般不能满足现场要求,比如在开机、停机或大幅度改变设定值时,短时间内系统偏差变化剧烈,容易造成较大的积分积累∑(Ek),使得控制输出急剧变化,系统超调严重,动态性能恶化。
为防止这一现象发生,常用积分分离法、超限削弱积分法和有效偏差法对标准PI算法进行改进,这在随动系统设计中较为常见。
由于本系统属于恒值控制系统,要求有软起和软停功能,利用上述改进算法已不能满足要求。为此,采用一种新的恒偏差算法。
恒偏差法和有效偏差法相类似。有效偏差法又叫逆算法。即当控制量Uk越限时,Uk取边界值Umax或Umin.由该边界值逆算出偏差值Ek'代替原来的偏差值Ek.然而,在恒偏差法中,是用经过衰减后的Ek'去代替Ek.系统在阶跃响应时,实际工作在过阻尼状态,从而减缓了在起、停时对主电路器件的冲击。图3示出两种算法的阶跃输入响应曲线。其中曲线(a)标准PI算法响应曲线、曲线(b)恒偏差法响应曲线。
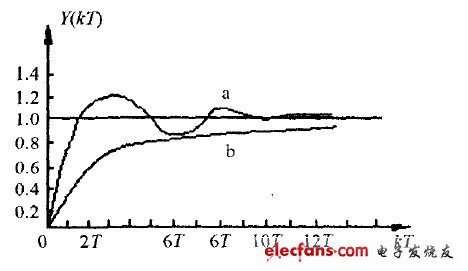
图3 系统阶跃响应曲线
(3)PI参数的整定
①采样周期T
由于主电路输出滤波网络决定了系统输出纹波的最大截止频率f,所以根据香农(Snon)定理可以决定采样频率的上限f1 =2f 工程上一般取f1=10f.
由于主电路参数已知,可求得:
其下限T2由8098软件执行时间决定。若采用12M晶振,平均每条语句执行时间为2us,程序运行大概需要500条语句,那么T2=1ms.所以:
1ms≤ T≤6ms
最终可通过现场调试来选择了1的大小。
② 比例因子Kp及积分时间常数Ti工程上常用临界比例度法,对常数Kp和Ti进行整定。即在闭环条件下,先暂时去掉积分作用,逐渐增大比例增益,直到闭环系统达到临界稳定状态,发生持续振荡为止。记下此时的临界增益Ku和振荡周期Tu ,通过查表得到Kp=和Ti的近似值,然后由整机调试进行修正。
本系统稳压闭环实验测定结果为:Ku =6,Tu=12.0ms.
查表可得:Kp=0.45 x Ku=2.7、Ti=Tu&pide;1.2=10ms.
通过整机调试,可得出递推公式中参数A 、B的值为:A=3、B=2.
(4)算法
为简化程序设计,在进行8098软件编程时,采用无符号数算法。
3)稳流方式(I)
稳流方式又称强充方式,系统作电流源闭环运行,原理同上,不同的是积分时间常数要小一些,调节速度较快。
实验数据如下:Tu=6.0ms,Ti=5ms、A=4,B=2.
4)稳压稳流自动转换(V/I)
当电池亏电时,系统以强充方式工作,电池电压逐渐升高。当超过设定值时,改为浮充方式。
即系统能根据负载情况自动选择充电模式。图4示出典型的二阶段充电曲线。
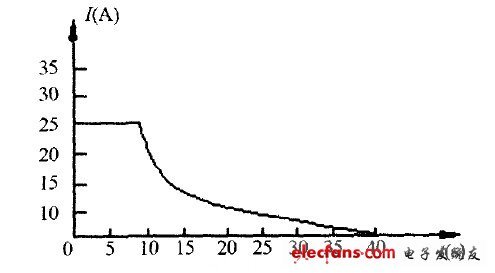
图4 蓄电池二阶段充电曲线
5)工作方式记忆(M1.M2)
系统可存储两组常用数据,即工作方式、电压电流给定值、稳压稳流转换值、过压过流值。
掉电时还能保护当前的工作记录。
6)软起、软停方式(SS)
按下该键,系统工作在软停方式。触发板将控制脉冲相位拉至最大,然后封锁脉冲输出。该键弹起,为软起方式。控制输出由最小慢慢升至给定值。
7)电池检测方式(TEST)
系统能循环检测电池电压,由数码管进行显示,也可通过串行口打印输出,并有报警提示。












